
毫米波雷達盲區偵測

根據交通部統計,2012~2014年間,大貨車肇事率為小型車7.2倍,大部分的事故是因為車體結構所產生的「視覺死角」以及轉彎時較大的「內輪差」造成.德國事故保險研究機構的報告顯示,右轉彎時大型車頭右側前段與中段,在內輪差路徑上發生的弱勢用路人之事故機率最高。
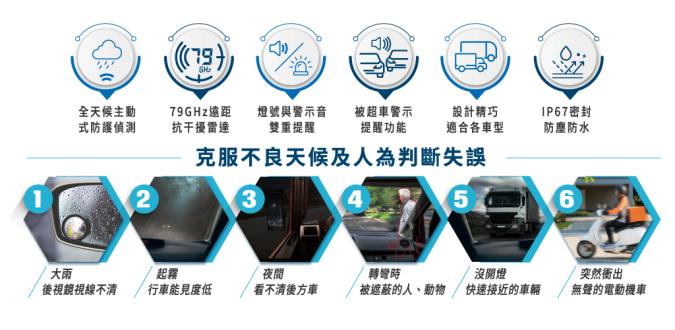
為何需要盲區偵測?
大車行駛在路上,經常外側摩托車鑽來鑽去,內側小客車也想超車,兩邊夾殺,視線死角又多,不仔細看真的很容易出事。當大車駕駛看到危險物,反應時間僅0.6至1秒!
資深客運駕駛也無奈表示,一般大客車車長約十二公尺,車身長阻擋視線,即使有後視鏡,仍有許多死角看不見,尤其轉彎時,遇到突然竄出的人車,根本無法立即判斷。開車時需注意大車前面和車身的四片後視鏡,現在還要看裝了攝像鏡頭的車內螢幕,如同再多一個後視鏡,螢幕小又分成四格違背眼看前方、手放方向盤之駕駛準則,只能分心快速掃視,更容易發生事故。
毫米波雷達盲區偵測系統,提供主動式偵測設備幫助駕駛提前預警,爭取更多時間預防意外的發生.
毫米波雷達盲區偵測如何運作?
- 毫米波雷達mmWave Radar,利用安裝於車上的感測器, 即時收集車輛內外環境資料。
- 進行靜、動態物體的辨識、偵測、與追蹤等技術上的處理。
- 在最短時間內提醒駕駛注意可能發生的事件,以警示音、亮燈的方式來提醒駕駛。
瞰車大提供防A柱、內輪差盲區的毫米波雷達產品之外,另可以搭配倒車超聲波雷達,讓駕駛獲得更周全的行車安全防護,減少盲區事故。